Navio — autopilot Board for Raspberry Pi
Hi Habr!
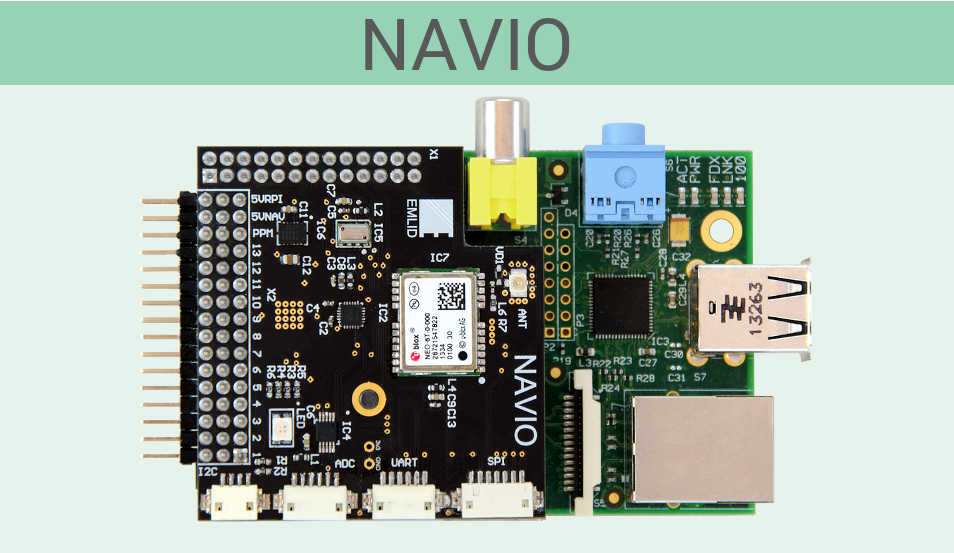
Introducing the Navio — extension Board for Raspberry Pi designed for managing planes, copters, boats and other robots. We have already passed the way from idea, prototyping and testing to a successful campaign to collect pre-orders on Indiegogo.
Previously we worked on a commercial autopilot on the microcontroller and each time adding a new functionality thought “But in Linux you could just connect libxyz for that.” However, at that time there existed a convenient hardware platform on which to develop, so we came to the decision to do Navio.
Raspberry was chosen as the most common and inexpensive Linux Board which has a huge community of users, has made her many projects with a detailed description. Among these projects includes copters, planes, boats — their creators had to use various Schild and breakout that eventually led to work with a huge pile of wires. Navio allows you to get rid of this and is a compact and convenient solution.
Unlike current autopilot platforms on microcontrollers, Raspberry Pi + Navio can be programmed in almost any language, easy to connect additional load — you can connect the camera and a WiFi-whistle and get FPV out of the box. Also have a Raspberry Pi more performance that can be useful when processing GPS data or by image recognition.

On the Board
the
-
the
- U-blox NEO — GPS\GNSS receiver. Two versions to choose from: Multisystem NEO-7M and NEO-6T with the possibility of obtaining phase measurements for processing. the
- MPU9250 — accelerometer, gyroscope, magnetometer to determine the orientation. the
- MS5611 — pressure transducer for calculating the height, also measure the temperature. the
- ADS1115 — 4 channel ADC to measure battery charge and connect any analog sensors. the
- PCA9685 — 16-channel PWM generator for controlling the servomotor 13 channels displayed on a standard servershare. the
- MB85RC — FRAM, non-volatile memory, up to 1 trillion of write operations\erase. the
- RGB LED for simple visual display of the status. the
- PPM input to connect the receiver, allows to switch the control to manual mode with the remote control. the
- DF13 connectors — Pixhawk-compatible connectors UART, I2C, SPI. Allow you to connect the unit, air speed sensor, and more. the
- Also, for supporting our campaign on Indiegogo, complete with fee will be sent to the GPS\GLONASS antenna and a set of wires with DF13 connectors.

Code
In order to be able to quickly start working with Navio we have prepared the drivers for sensors and are now working on tutorials that show how to use them.
Crowdfunding
We decided to run a crowdfunding campaign in order to assess the demand for our device and to collect the necessary amount for the production of the first large batch of boards at the factory. More information can be found on our page on Indiegogo:
Navio on Indiegogo
Unfortunately, only in English, but I'll be glad to answer any questions in the comments or by mail info@emlid.com



Комментарии
Отправить комментарий